- Author
- Max Houwing
-
Contact: m.hou.nosp@m.wing.nosp@m.@stud.nosp@m.ent..nosp@m.tue.n.nosp@m.l / maxho.nosp@m.uwin.nosp@m.g@gma.nosp@m.il.c.nosp@m.om
- Date
- November 23rd, 2015
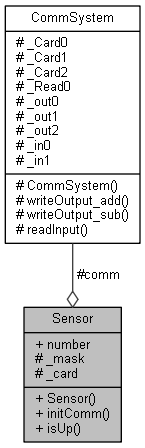
This class handles all of the sensors that are (usually) not connected to any other component of the xCPS machine. These include for example the optical sensor and position sensors that can be used for the index tables. The method isUp() (sensor_isUp in the xCPS class) allows checking of individual sensors. Since the call in the xCPS class requires a sensor number, enums are used to somewhat simply these calls. A full list of these enums can be found in the "Useful information" document that can be found near the xCPS machine or on the wiki, or in the documentation. In general though, it hold for the optical sensor that the enum has the following form: "band#nr#", where # after the band is the number of band (belt) where the sensor is located, with the # after 'nr' is the number of the sensor, which can be found on the schematic of the machine. Furthermore, the position sensor usually have the format "positionx", where x indicates the location, for example "positionswitchband2" and "positionpickplace".
 1.8.10
1.8.10

