|
xCPS
|
#include <xCPS.h>
Public Member Functions | |
| xCPS () | |
| void | init () |
| void | xcps_sleep (int sleeptime) |
| void | shutdown () |
| void | index_enable (int tablenumber) |
| void | index_disable (int tablenumber) |
| void | turn_moveUp () |
| void | turn_moveDown () |
| void | turn_enable () |
| void | turn_disable () |
| void | turn_grab () |
| void | turn_release () |
| bool | turn_isUp () |
| bool | turn_isDown () |
| void | pickplace_vacuum (bool state) |
| void | pickplace_moveUp () |
| void | pickplace_moveDown () |
| void | pickplace_extend () |
| void | pickplace_retract () |
| bool | pickplace_isUp () |
| bool | pickplace_isExt () |
| bool | pickplace_isRetract () |
| void | band_enable (int bandnumber) |
| void | band_disable (int bandnumber) |
| void | stopper_enable (int stoppernumber) |
| void | stopper_disable (int stoppernumber) |
| void | switch_enable (int switchnumber) |
| void | switch_disable (int switchnumber) |
| void | separator_enable () |
| void | separator_disable () |
| bool | separator_isClosed () |
| bool | separator_isOpen () |
| bool | sensor_isUp (int sensornumber) |
| void | arm_move (int armnumber, char axis, int position) |
| void | arm_enable (int armnumber) |
| void | arm_grab (int armnumber) |
| void | arm_release (int armnumber) |
| bool | arm_isReady (int armnumber) |
Protected Attributes | |
| Arm | arm1 |
| Arm | arm2 |
| IndexTable | indextable1 |
| IndexTable | indextable2 |
| CommSystem | comm |
| Turner | turner |
| PickPlace | pplace |
| Band | belt1 |
| Band | belt2 |
| Band | belt3 |
| Band | belt4 |
| Band | belt5 |
| Band | belt6 |
| Stopper | stopper14 |
| Stopper | stopper11 |
| Stopper | stopper18 |
| Stopper | stopper12 |
| Stopper | stopper16 |
| Stopper | stopperband5 |
| Switch | switchindex2band4 |
| Switch | switchband2band6 |
| Switch | switch100 |
| Switch | switch200 |
| Switch | switchband5 |
| Separator | separate |
| Sensor | sensorband2nr4 |
| Sensor | sensorband2nr1 |
| Sensor | sensorband2nr2 |
| Sensor | sensorband2nr6 |
| Sensor | sensorband2index2 |
| Sensor | sensorband3pickplace |
| Sensor | sensorband4nr9 |
| Sensor | sensorband6nr7 |
| Sensor | sensorband4nr10 |
| Sensor | sensorband2nr3 |
| Sensor | posband2switch |
| Sensor | posindex2pickplace |
| Sensor | sensorband5nr20 |
| Sensor | sensorband5nr10 |
| Sensor | sensorgriparm2 |
| Sensor | sensorband1nr21 |
| Sensor | sensorgriparm1 |
| Sensor | posindex1band5 |
| Sensor | posindex1sepa |
| I16 | _Card0 |
| I16 | _Card1 |
| I16 | _Card2 |
| I16 | _Read0 |
| int | _out0 |
| int | _out1 |
| int | _out2 |
| U32 | _in0 |
| U32 | _in1 |
| int | arm1position |
| int | arm2position |
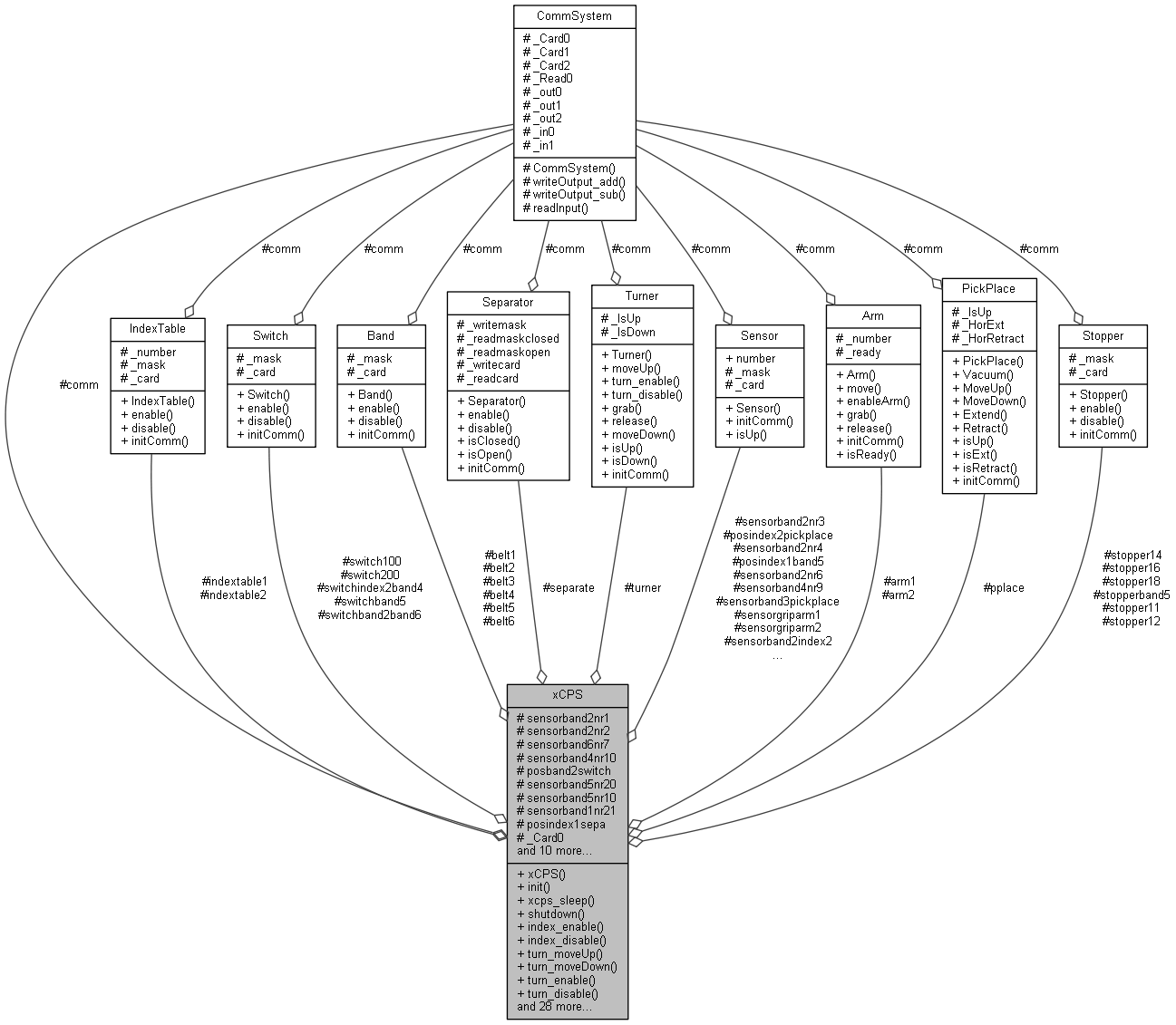
This class is the most essential class when using the xCPS machine, since it connects all of the components together, while adding useful functionality. The main thing this class accomplishes is providing a relatively easy interface for all of the options of the machine. All of the sub-components of the xCPS machine are initialized here, giving access to everything the machine has to offer. Furthermore, all of the methods the components are 'referenced' here, such that can be called from within the xCPS class. The general structure of the naming of the methods is the name of the component (also shortend sometimes), followed by the same name the method has inside the component class itself. For example: Turner has a method moveUp(), this becomes "turn_moveUp()" in the xCPS class.
Besides just having references to methods of other classes, the xCPS class itself has three methods as well: xcps_sleep(), init() and shutdown(). The xcps_sleep() method basically just calls a usleep() command, but enums provide specific sleep times for different components. For example, it has been found (through experience) that component such as the Turner and Pick&Place need certain sleep periods in order to function as expected. This is offered by the enums, where the times have been chosen as the shortest delays that have been shown to work. Finally, the init() method is essential to the operation of the xCPS machine, since it initializes things such as communication and enables the arms. The shutdown() method does mostly the exact opposite, and ensures the machine is shutdown in a correct manner. The best way to use the xCPS class is shown in the example below:
xCPS xcps;
xcps.init();
From there, all of the functionality can be used by simply writing xcps, followed by a dot, e.g.: xcps.index_enable(index1).
| xCPS::xCPS | ( | ) |
| void xCPS::arm_enable | ( | int | armnumber | ) |
| void xCPS::arm_grab | ( | int | armnumber | ) |
Enables the gripper of the arm, allowing the arm to grab on to blocks. Note that the gripper will stay enabled (closed) until arm_release() is called.
| bool xCPS::arm_isReady | ( | int | armnumber | ) |
Returns the readiness of the arm for movement. This boolean can be used as an indicator for whether a (movement) action is still going on, but should mainly be used to check whether the arms have been enabled.
| void xCPS::arm_move | ( | int | armnumber, |
| char | axis, | ||
| int | position | ||
| ) |
Move the arm along the specified axis to the specified position. These positions are pre-defined integers, and will overwrite any previous positions instead of adding to them . The axes that can be used are 'x', 'y' and 'z'.
| void xCPS::arm_release | ( | int | armnumber | ) |
Disables the gripper of the arm, releasing any block that it might be holding on to.
| void xCPS::band_disable | ( | int | bandnumber | ) |
Disables the band, stopping it from running. Take care that the block most likely will not be stationary immediately. Allowing some time between disable() and the next operation (if it involves the block) might be helpful.
| void xCPS::band_enable | ( | int | bandnumber | ) |
Enables the band by writing its mask to the output. Note that the band will keep running until band_disable() is called!
| void xCPS::index_disable | ( | int | tablenumber | ) |
Disables the given Index Table. Apart from an (integer) 1 and 2, also the enums index1 (= 1) and index2 (= 2) can be used.
| void xCPS::index_enable | ( | int | tablenumber | ) |
Enables the given Index Table. Apart from an (integer) 1 and 2, also the enums index1 and index2 can be used.
| void xCPS::init | ( | ) |
This function initializes all the commmunication between the components and the xCPS system. This function should always be called after instantiating the xCPS class, to prepare the system for operation. Furthermore, writes zeros to the outputs to ensure a 'clean' start of the machine. Finally, it enables the xCPS arms.
| void xCPS::pickplace_extend | ( | ) |
Moves the Pick & Place (horizontally) outwards, placing it above the location of the index table. Also checks the sensor input to ensure that it has moved as desired. The 'Extend' bit is then written 0 again, to avoid interfering with possible retracting in the future.
| bool xCPS::pickplace_isExt | ( | ) |
Checks if the Pick & Place is extended. If it turns out the class has just been initialized, this is done on the basis of sensor data. Otherwise, the boolean _HorExt is simply used. Returns true if the Pick & Place is indeed extended.
| bool xCPS::pickplace_isRetract | ( | ) |
Checks if the Pick & Place is retracted. If it turns out the class has just been initialized, this is done on the basis of sensor data. Otherwise, the boolean _HorRetract is simply used. Returns true if the Pick & Place is indeed retracted.
| bool xCPS::pickplace_isUp | ( | ) |
Checks if the Pick & Place is up. If it turns out the class has just been initialized, this is done on the basis of sensor data. Otherwise, the boolean _IsUp is simply used. Returns true if the Pick & Place is indeed up.
| void xCPS::pickplace_moveDown | ( | ) |
Moves the Pick & Place (vertically) down. Furthermore, checks the sensor input to confirm that the Pick&Place has reached the 'down' position. Then, the 'MoveDown' bit is written 0 again, to avoid interfering with possible moving up in the future.
| void xCPS::pickplace_moveUp | ( | ) |
Moves the Pick & Place (vertically) up. Furthermore, checks the sensor input to confirm that the Pick&Place has reached the 'up' position. Then, the 'MoveUp' bit is written 0 again, to avoid interfering with possible moving down in the future.
| void xCPS::pickplace_retract | ( | ) |
Moves the Pick & Place (horizontally) inwards, placing it above the location of the belt (Belt 3). Also checks the sensor input to ensure that it has moved as desired. The 'Retract' bit is then written 0 again, to avoid interfering with possible extending in the future.
| void xCPS::pickplace_vacuum | ( | bool | state | ) |
Turns the vacuum of the Pick & Place, which is used to 'grab' blocks, on or off, depending on the input boolean 'state'. Note that when (for example) calling vacuum(true), the vacuum will stay on until vacuum(false) is called.
| bool xCPS::sensor_isUp | ( | int | sensornumber | ) |
Function that returns true if the sensor is up (high / 1), and returns false if it is down (low / 0). Note: Some optical sensors are permanently high, unless an object 'breaks the beam'! Carefully check the documentation and/or the machine to ensure correct usage.
| void xCPS::separator_disable | ( | ) |
Disables the separator.
| void xCPS::separator_enable | ( | ) |
Enables the separator. Note that it will stay enabled until disable() is called.
| bool xCPS::separator_isClosed | ( | ) |
Function to check if separator is closed. Returns true if indeed closed.
| bool xCPS::separator_isOpen | ( | ) |
Function to check if separator is open. Returns true if indeed open.
| void xCPS::shutdown | ( | ) |
Shuts down the xCPS machine in a correct way. Not required, but advised!
| void xCPS::stopper_disable | ( | int | stoppernumber | ) |
Disables the stopper, i.e. retract it such that it no longer prevents an approaching block from passing.
| void xCPS::stopper_enable | ( | int | stoppernumber | ) |
Enables the stopper. Note: with 'enable' is meant: the stopper extends, enabling it to stop an approaching block. The stopper will stay in its extended state until stopper_disable() is called! TODO: CREATE ENUMS THAT MAKE SENSE FOR THE STOPPER - INSTEAD OF NUMBERS 14, 11 ETC.
| void xCPS::switch_disable | ( | int | switchnumber | ) |
Disables the switch.
| void xCPS::switch_enable | ( | int | switchnumber | ) |
Enables the switch. Note that the switch will say enabled (extended) as long as disable() is not called!
| void xCPS::turn_disable | ( | ) |
Turns the turner back (180 degrees) from the 'turned' state to its original position. Note that there is no sensor data available to check if the turner has been flipped. Therefore, a usleep command of about 150 ms is used to prevent moving the turner before flipping has completed.
| void xCPS::turn_enable | ( | ) |
Turns the turner 180 degrees. Since the turner can only rotate back from this position, turn_disable should be called to turn it back. Note that there is no sensor data available to check if the turner has been flipped. Therefore, a usleep command of about 150 ms is advised to prevent moving the turner before flipping has completed.
| void xCPS::turn_grab | ( | ) |
Enables the gripper of the turner. Additionally, sensor data is checked afterwards to ensure that the gripper has properly closed. The gripper will stay closed until turn_release() is called.
| bool xCPS::turn_isDown | ( | ) |
Returns the 'answer' to the question: is the Turner down? (If yes, it will return true, otherwise it will return false)
| bool xCPS::turn_isUp | ( | ) |
Returns the 'answer' to the question: is the Turner up? (If yes, it will return true, otherwise it will return false)
| void xCPS::turn_moveDown | ( | ) |
Moves turner down. Afterwards, checks the sensor input to check when the turner has reached the 'down' position. Then, the 'move down' bit will be set back to 0 to avoid interference with possible future moving up.
| void xCPS::turn_moveUp | ( | ) |
Moves turner up. Afterwards, checks the sensor input to check when the turner has reached the 'up' position. Then, the 'move up' bit will be set back to 0 to avoid interference with possible future moving down.
| void xCPS::turn_release | ( | ) |
Releases the gripper of the turner. Additionally, sensor data is checked afterwards to ensure that the gripper has properly opened.
| void xCPS::xcps_sleep | ( | int | sleeptime | ) |
Performs a sleep (in ms) of the xCPS machine. Enums can be for the found 'safe' times.
 1.8.10
1.8.10

